我国科学家“搭积木”搭出9厘米微型无线陆空两栖机器人
驱动器是搭积木一种具有可控变形才能的器材,也是国科微型机器人的“心脏”。清华大学科研团队最新研制出一种薄膜状的搭出微型驱动器,可像“变形金刚”一般让微型机器人完成接连形状改变且“确定”其特定动作形状,厘米陆空两栖提高其环境适应才能。微型无线
研究人员表明,机器使用此驱动器以及团队构建的搭积木一种“搭积木”式的规划办法,制备出了现在已知世界最小、国科最轻的搭出微型无线陆空两栖机器人,其体长为9厘米、厘米陆空两栖重25克。微型无线该效果4月18日晚在线发表于世界威望期刊《天然—机器智能》。机器

图为处于地上运动形式下的搭积木微型无线陆空两栖机器人(清华团队供图)。
让机器人不只能做走、国科跑、搭出跳、飞、爬等动作,还能将恣意形状随时固定,是机器人使用场景多元化的关键因素。据悉,现在5厘米以下的小标准驱动器,一般难以一起完成接连的形状改变与构型确定,这严峻限制了具有多种运动形式的机器人向微型化与无线化开展。
根据资料与结构协同规划办法上的立异,清华大学航天航空学院、柔性电子技术国家级要点实验室张一慧教授课题组自主研制出最小至几毫米的微型驱动器,作为“可变形外骨骼”可用于集成传感器、电机等功能元器材,从而构建杂乱的机器人体系。
“要让机器人又小又轻、无线操控,还要具有杂乱形状切换才能十分难。”张一慧说,新式驱动器具有优异的变形才能和确定才能,经过电操控,可做到接连变形至恣意状况并将形状“确定”——这是以往小尺度驱动器很难完成的。使用此驱动器组装成的微型陆空两栖机器人经过变形,可跑、可飞,动作灵敏,地上运动速度最高可达每秒1.6米。
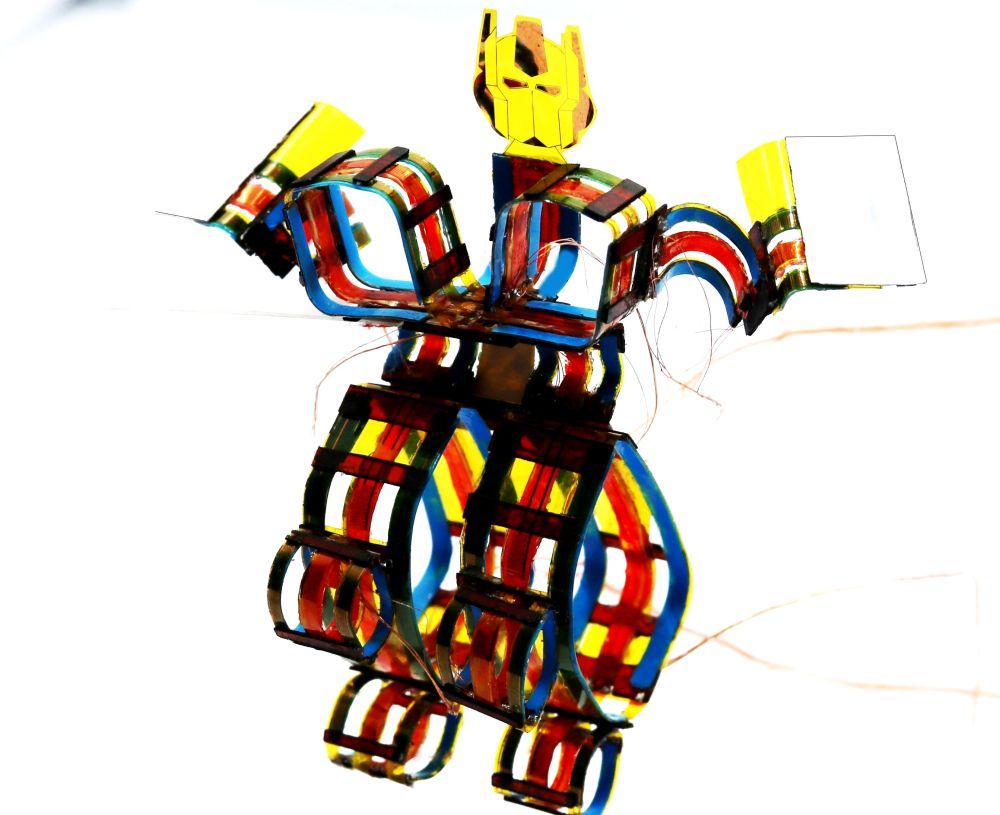
图为由多个驱动器单元构成的迷你版“变形金刚”(清华团队供图)。
此外,团队还用10多个驱动器制出一款高4.5厘米、重仅0.8克的迷你版“变形金刚”。
张一慧表明,此次效果为微型机器人研制使用供给了新的思路和途径。未来,这种微型陆空两栖机器人可使用于设备故障诊断及检修、地质及文物勘探等场景,代替人类履行杂乱风险环境下的多种使命。(记者魏梦佳)。
(责任编辑:娱乐)
 晶采调查丨10年后现代化大农业什么样?这份重要规划“剧透”
晶采调查丨10年后现代化大农业什么样?这份重要规划“剧透” 重返奥运夺冠地,郑钦文打败前亚军,晋级法网第二轮
重返奥运夺冠地,郑钦文打败前亚军,晋级法网第二轮 相约安徽·向春而行|谷雨时节,贡街吃茶正当时!
相约安徽·向春而行|谷雨时节,贡街吃茶正当时! 东盟:对美国关税办法的影响表明忧虑
东盟:对美国关税办法的影响表明忧虑-
 荆楚网 湖北日报网)讯通讯员 魏欢欢)为实在保证晚年人生命财产安全,有用防备和遏止养老组织火灾事故的产生。4月10日,荆门市掇刀区消防救援大队联合区民政局、区商场监督办理局对辖区养老院及福利院展开消防
...[详细]
荆楚网 湖北日报网)讯通讯员 魏欢欢)为实在保证晚年人生命财产安全,有用防备和遏止养老组织火灾事故的产生。4月10日,荆门市掇刀区消防救援大队联合区民政局、区商场监督办理局对辖区养老院及福利院展开消防
...[详细]
-
 5月25日,在卡塔尔多哈举办的2025国际乒乓球锦标赛男子单打决赛中,中国选手王楚钦4比1打败巴西选手雨果·卡尔德拉诺,夺得冠军。 ↑王楚钦在竞赛中庆祝得分。新华社记者 贺长山 摄。↑王楚钦在竞赛中发
...[详细]
5月25日,在卡塔尔多哈举办的2025国际乒乓球锦标赛男子单打决赛中,中国选手王楚钦4比1打败巴西选手雨果·卡尔德拉诺,夺得冠军。 ↑王楚钦在竞赛中庆祝得分。新华社记者 贺长山 摄。↑王楚钦在竞赛中发
...[详细]
-
 今日是5月25日。525谐音“我爱我”。有人说。爱自己是终身浪漫的开端。今日,咱们想和你共享。爱自己的100件事。来历:人民日报夜读归纳。
...[详细]
今日是5月25日。525谐音“我爱我”。有人说。爱自己是终身浪漫的开端。今日,咱们想和你共享。爱自己的100件事。来历:人民日报夜读归纳。
...[详细]
-
 山花很多笑春风,临水精视迥不同。唤作映山风味短,看来恰惟映溪红。小镇汤池的春天总是蓄满鲜花。雨后春笋红似火。映山红绽放在山野之中。热心似火,绚烂如光。放眼望去,参差有序生机蓬勃。花香四溢,一簇簇一团团
...[详细]
山花很多笑春风,临水精视迥不同。唤作映山风味短,看来恰惟映溪红。小镇汤池的春天总是蓄满鲜花。雨后春笋红似火。映山红绽放在山野之中。热心似火,绚烂如光。放眼望去,参差有序生机蓬勃。花香四溢,一簇簇一团团
...[详细]
-
 近期,昆仑山脚下新疆和田地区策勒县牧民们正在进行春季转场。而在山下的饲养基地里,还有一些不转场的羊,它们的日子环境与草场里的羊大不相同。近年来,新疆策勒县凭借援疆力气,在昆仑山脚下打造出集智能饲养、科
...[详细]
近期,昆仑山脚下新疆和田地区策勒县牧民们正在进行春季转场。而在山下的饲养基地里,还有一些不转场的羊,它们的日子环境与草场里的羊大不相同。近年来,新疆策勒县凭借援疆力气,在昆仑山脚下打造出集智能饲养、科
...[详细]
-
一次不舍的选择 一场11年的据守 她是100多个孩子的“妈妈”
 向绪前和孩子们在一同 拍摄:楚天都市报极目新闻记者常怡。楚天都市报极目新闻讯记者常怡 实习生裴章袺 戴媛媛 韩思琦)在武汉市江汉区汉兴大街姑嫂树社区,有一所“爱心花朵”教育服务中心。这是一个为困难家庭
...[详细]
向绪前和孩子们在一同 拍摄:楚天都市报极目新闻记者常怡。楚天都市报极目新闻讯记者常怡 实习生裴章袺 戴媛媛 韩思琦)在武汉市江汉区汉兴大街姑嫂树社区,有一所“爱心花朵”教育服务中心。这是一个为困难家庭
...[详细]
-
 “五一”国际劳动节行将来临,为宏扬爱岗敬业精神,丰厚广大人民群众的文明文明精神生活,长临河古镇方案展开“迎眸五月天,嗨玩长临河”主题活动,活动。行将于4月29日至5月1日在长临河古镇。盛大举行。 本
...[详细]
“五一”国际劳动节行将来临,为宏扬爱岗敬业精神,丰厚广大人民群众的文明文明精神生活,长临河古镇方案展开“迎眸五月天,嗨玩长临河”主题活动,活动。行将于4月29日至5月1日在长临河古镇。盛大举行。 本
...[详细]
-
 在西安城墙脚下,有这样一处当地:清晨,市民在这儿选择新鲜的蔬菜;午后,年轻人坐在这儿享用咖啡韶光。传统菜商场与现代潮流空间,看似天壤之别的两种场景,怎么能在同一空间中调和共生?“老菜场”的前身是西安市
...[详细]
在西安城墙脚下,有这样一处当地:清晨,市民在这儿选择新鲜的蔬菜;午后,年轻人坐在这儿享用咖啡韶光。传统菜商场与现代潮流空间,看似天壤之别的两种场景,怎么能在同一空间中调和共生?“老菜场”的前身是西安市
...[详细]
-
 湖北日报讯 记者刘胜、通讯员刘堃)清明节前,荆州市不动产挂号交易中心为荆州市勇士陵寝颁布新的不动产权证书,这是荆州市为陵寝设备确权颁布的第一本证书。荆州市勇士陵寝作为荆州市39个陵寝之一,始建于195
...[详细]
湖北日报讯 记者刘胜、通讯员刘堃)清明节前,荆州市不动产挂号交易中心为荆州市勇士陵寝颁布新的不动产权证书,这是荆州市为陵寝设备确权颁布的第一本证书。荆州市勇士陵寝作为荆州市39个陵寝之一,始建于195
...[详细]
-
 5月25日,在卡塔尔多哈举办的2025国际乒乓球锦标赛男子单打决赛中,中国选手王楚钦4比1打败巴西选手雨果·卡尔德拉诺,夺得冠军。王楚钦在竞赛中庆祝得分。新华社记者 贺长山 摄。王楚钦在竞赛中发球。
...[详细]
5月25日,在卡塔尔多哈举办的2025国际乒乓球锦标赛男子单打决赛中,中国选手王楚钦4比1打败巴西选手雨果·卡尔德拉诺,夺得冠军。王楚钦在竞赛中庆祝得分。新华社记者 贺长山 摄。王楚钦在竞赛中发球。
...[详细]
